Onderzoekers van de afdeling BioMechanical Engineering aan de TU Delft hebben een rugzak-achtige draagbare revalidatierobot ontwikkeld. Die robot, GyBAR genaamd, is uitgerust met een gyroscopische actuator die het evenwicht tijdens de revalidatie ondersteunt. Daardoor wordt niet alleen voorkomen dat de revaliderende patiënt valt, maar heeft hij of zij ook de handen vrij.
De onderzoekers waren op zoek naar een beter hulpmiddel voor het ondersteunen van het evenwicht van revaliderende patiënten. De huidige hulpmiddelen, zoals stokken, looprekken, krukken en handrails, zijn weliswaar nuttig, maar verre van perfect. Tijdens het gebruik kunne patiënten de handen niet gebruiken voor het openen van deuren, het dragen van boodschappen en andere handelingen. Bovendien moeten patiënten voor het gebruik van die hulpmiddelen vaak hun houding aanpassen. Er zijn natuurlijk ook al geavanceerdere hulpmiddelen, zoals mobiele ondersteuningssystemen voor het lichaamsgewicht of robot looptrainers. Echter, die nemen veel plaats in of kunnen alleen in specifieke omgevingen gebruikt worden. Dat geldt niet voor de draagbare GyBAR rugzak-robot.
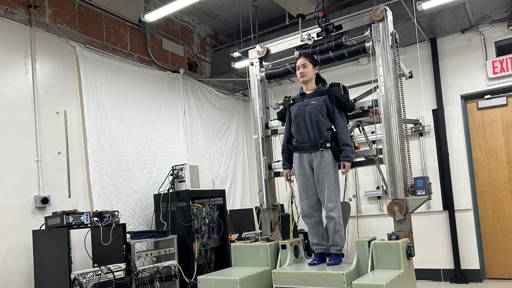
GyBAR robot
De GyBAR robot is ontwikkeld door een aantal onderzoekers van de afdeling BioMechanical Engineering van de TU Delft, onder leiding van hoogleraar Heike Vallery. Het team liet zich bij de ontwikkeling inspireren door het oriëntatievermogen van satellieten. Die kunnen hun oriëntatie in de ruimte te veranderen zonder gebruik van kracht of moment ten opzichte van hun omgeving.
De GyBAR bevat een speciaal ontwikkelde gyroscopische actuator. Dit is een met elektromotoren herpositioneerbare draaiende schijf. Deze actuator ondersteunt het evenwicht bij uiteenlopende activiteiten en in verschillende omgevingen. De onderzoekers van de TU Delft zijn er in geslaagd deze actuator te bouwen op basis van het gyroscopische effect dat doorgaans toegepast wordt in sensoren, zoals de gyroscoopsensor van smartphones. Omdat de GyBAR op de rug van de revaliderende patiënt geplaatst wordt, blijven de handen vrij.
Op een satelliet (of op het menselijk lichaam) kan moment worden uitgeoefend door het hoekmoment van interne vliegwielen te wijzigen, waardoor een bepaalde rotatie wordt gerealiseerd of juist voorkomen. Eén techniek daarvoor maakt gebruik van het zogenaamde gyroscopische effect, dat kan worden waargenomen bij draaiende tollen, die het effect van de zwaartekracht weerstaan.

Het ontwikkelteam en testresultaten
Het ontwikkelteam van de TU Delft bestaat uit onderzoekers Andrew Berry, Daniel Lemus en Saher Jabeen, onder leiding van hoogleraar Heike Vallery en Frans van der Helm. Het team werkte ook samen met Westland Orthopedie BV, DEMO (Dienst Elektronische en Mechanische Ontwikkeling) en Hyperion Technologies BV.
De klinische beoordeling van de GyBAR is uitgevoerd in samenwerking met het Max Näder Center for Rehabilitation Technologies and Outcomes Research in het Shirley Ryan AbilityLab in Chicago en met revalidatiearts Carel Meskers van het VUmc. De resultaten van de eerste experimenten met mensen en potentiële eindgebruikers zijn gepubliceerd in Scientific Reports van Nature.