Microrobots, nanobots, moleculaire robots, robotzwermen voor minimaal invasieve chirurgie: de afgelopen jaren waren er evenveel termen als onderzoeksgroepen, maar het doel is eenduidig: medicatie of andere vormen van behandeling brengen naar elk deel van het lichaam. En hoewel een praktische behandeling met nanobots, microbots of robotzwermen nog ver verwijderd van ons lijkt, worden er steeds meer stappen in de juiste richting gezet. Aan het TechMed Centrum van de Universiteit Twente (UT) zet Islam Khalil deze stappen met zijn onderzoeksgroep.
Het wordt al snel duidelijk in het gesprek met Khalil: hij is erg gepassioneerd over het bouwen van allerlei miniatuur-‘voertuigen’ voor het heel gericht op afstand toedienen van medicatie en bieden van behandeling. Niet voor niets heeft hij al een fors deel van zijn carrière aan ontwikkelingen op dit gebied besteed.
“Het is prachtig wanneer je met dergelijke robotjes in lichaamsvloeistoffen met behulp van magnetische krachten kunt navigeren, in beperkte ruimtes zoals bloedvaten, zelfs tegen de bloedstroom in. Zo kunnen we plekken bereiken waar je met de traditionele flexibele instrumenten of katheters niet kunt komen.”
Divers team
Khalil werkt samen met een divers team aan het TechMed Centrum van de UT. Daaronder vallen materieel wetenschappers, scheikundigen, megatronische ingenieurs en controle-ingenieurs.
“Daarnaast hebben we medische partners in het Radboudumc, maar ook werken we samen met het Medisch Spectrum Twente. Zij geven ons inzicht in de behoeften van de klinische praktijk. We werken al vier jaar samen met het Radboudumc en hebben in die tijd twee beurzen binnengehaald, waaronder een seed fonds. Dat geeft ook wel aan hoe belangrijk het is om breed samen te werken.”
Twee elementen
Het onderzoek waar Khalil mee bezig is, bestaat uit twee elementen. Allereerst het voertuig (vehicle) zelf: wat kan het? Het moet sterk en wendbaar genoeg zijn om tegen een stroom in te zwemmen. Daarnaast is er de strategie achter dit voertuig: welke behoefte moet hij vervullen?
“We zijn al vrij ver in de ontwikkeling van de robots zelf: nanobots, microbots, minibots. De grootte is niet het probleem. We kunnen dat aanpassen aan waar het voertuig heen moet zwemmen. De robots kunnen via imaging gedetecteerd worden. Ze zijn permanent controleerbaar, zodat je ze naar een plek van bestemming kunt sturen en daarna kunt terughalen.”
Maar dan: als je dit ‘voertuig’ hebt, welke use cases zijn er voor? Genoeg, meent Khalil: bijvoorbeeld het herstellen van de bloedstroom in verstopte bloedvaten; of de interactie met ongewenste bloedcellen die voor klontering zorgen. “Maar om deze use cases te realiseren, moeten we bepalen welke acties de robotjes moeten ondernemen? Wil je een mechanische aanpak (door de klontering heen boren), wil je chemische stoffen of medicatie afleveren die de klontering aanpakken? Wil je allebei, en zo ja: in welke verhouding?”
Goede richting
Door aan beide elementen te werken, zet de onderzoeksgroep steeds meer stappen in de goede richting. Een belangrijke stap vooruit is volgens Khalil momenteel de samenwerking met een vasculair chirurg en met andere medisch specialisten om de medische behoeften en beperkingen in kaart te brengen. Ook belangrijk blijft de eerdergenoemde samenwerking met het Radboudumc. “Zo kunnen we concreet de medische problemen mee nemen waar zij tegenaan lopen en vertalen naar technische hordes die we een voor een oplossen.”
Khalil stelt dat de onderzoeksgroep inmiddels over een sterk instrument beschikt dat in alle mogelijke lichaamsvloeistoffen kan navigeren, ook in de ruggengraat. “We hebben hier al goede modellen voor ontwikkeld. En het hele lichaam is via lichaamsvloeistoffen en zacht weefsel bereikbaar. Daarmee is het dus in theorie mogelijk om ongewenste cellen, ongewenst weefsel te bereiken en medicatie of andere stoffen op de juiste locatie af te leveren.”
Specifieke use cases
Khalil benadrukt dat er niet gewerkt wordt aan een ‘one size fits all-robot, waarmee je elke locatie in het lichaam kunt bereiken en elk soort use case kan beantwoorden. “Dat is ook niet realistisch. Het is realistisch om te werken aan specifieke robots voor specifieke use cases, zoals we nu in Nijmegen doen.”
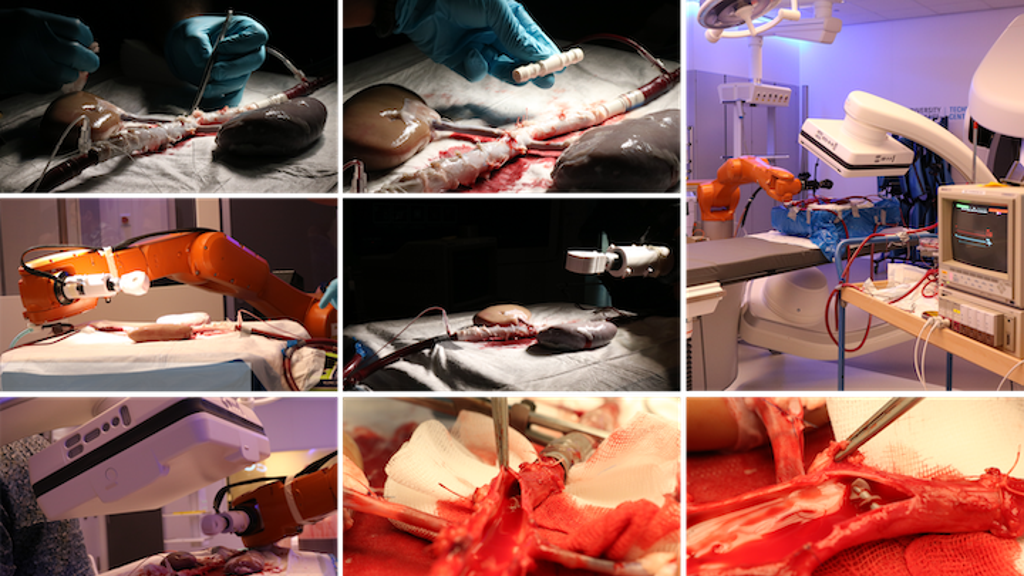
Eén van de problemen die chirurgen hier hebben, is het bereiken van bepaalde blokkades in het onderbeen, een aandoening die valt onder acute ischemie van de ledematen1. De huidige kathetergebaseerde aanpak werkt niet bij bloedklonters beneden de knie, schetst Khalil. “Wat wij nu doen, is een robot ontwerpen die specifiek in deze omgeving kan navigeren. Dit is de beste manier om van labexperimenten naar de volgende fase te gaan.”
Khalil vindt het wel erg lastig om een tijdspad te koppelen aan de diverse fases, laat staan aan toepassing in de klinische praktijk. “We zijn nog niet zover dat we met levende dieren kunnen experimenteren. Zolang we dit niet doen, kunnen we nog niet echt een tijdspad geven.”
Internationale samenwerking
Om dit tijdspad te versnellen, vindt samenwerking ook internationaal plaats. Bijvoorbeeld met vergelijkbare onderzoeksgroepen in onder meer Singapore en Hongkong. “We stimuleren en inspireren elkaar. Zo versnellen we ons onderzoek. De ene keer komen wij met een nieuw inzicht, of succesvolle proef, dan weer een andere onderzoeksgroep. We concurreren niet, we leren van elkaar. Als de ene groep een horde neemt, dan kunnen we dat allemaal.”
Zo was het vijf jaar geleden nog een grote stap dat robots via het oogvlies het lichaam binnen konden komen. Een heel inspirerend experiment, vond ook Khalil destijds. Maar om robots hier te volgen, heb je geen imaging- technologie nodig. Dat geldt echter wel voor robots dieper in het menselijk lichaam.
“Nu zijn we in staat om imaging in te zetten om robots in het hele lichaam te volgen. En ik denk dat we met onze experimenten ook weer hordes genomen hebben die andere onderzoeksgroepen inspireren. Uiteindelijk moet je dit zien als een gezamenlijke inspanning, waarmee we mondiaal de gezondheidszorg een stukje vooruit kunnen helpen.”